Grasper analysis
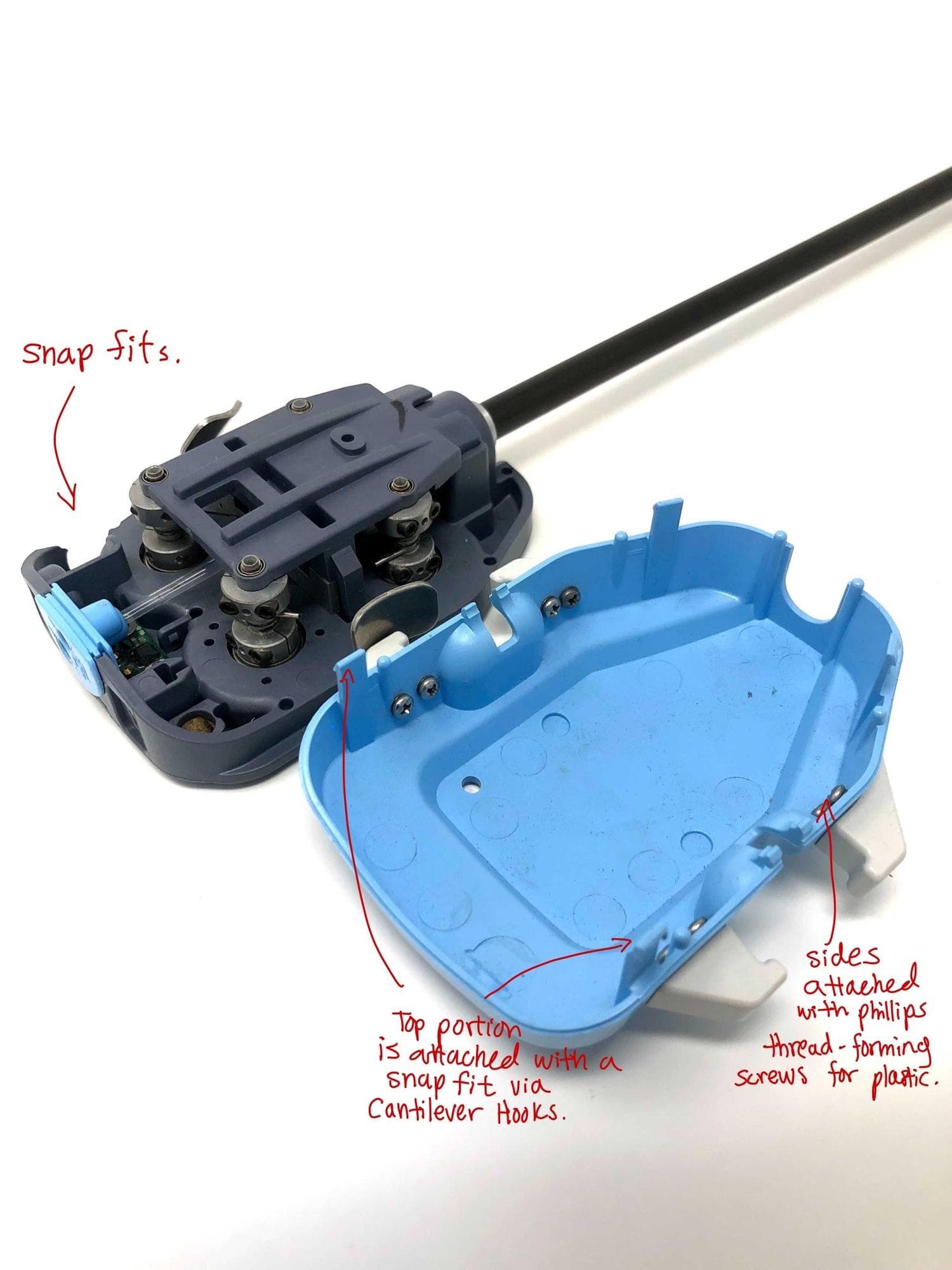
A teardown and mechanical analysis of an Intuitive Surgical small grasping retractor, the kind of end-effector that lives at the tip of a robotic surgery system's arm and gently holds tissue out of the way for the surgeon.
The goal was to understand how the design works. Surgical end-effectors are constrained by an unusual combination of demands: sub-millimeter precision, articulation through a port the diameter of a pen, and repeated autoclave cycles that are mechanically and chemically harsh.
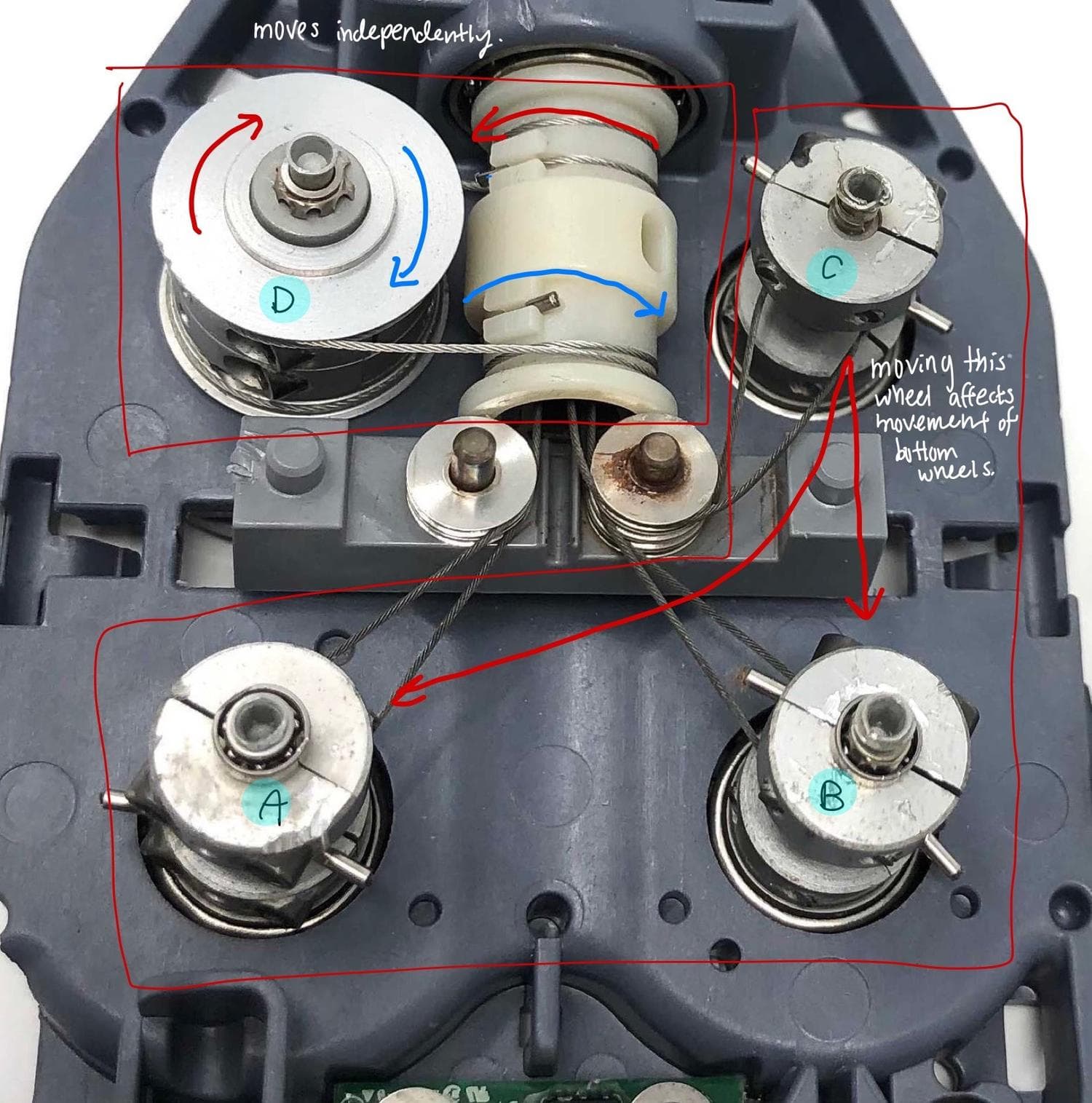
Disassembly revealed the linkage geometry, the cable-driven actuation that turns motor inputs at the proximal end into jaw motion at the distal end, and the spring system that returns the jaws to a default state if a cable goes slack. The cable routing is laid out to minimize friction over the bend radii and to redistribute load so no single tendon carries the full closing force. The pivot pins are pressed and staked so they can't migrate during sterilization cycles. The jaw faces carry a textured grip pattern matched to typical tissue stiffness, fine enough not to perforate, coarse enough not to slip.
The teardown was a study in what mature engineering looks like: nothing is over-built, but every detail is deliberate. A useful frame for thinking about my own designs, what's in this thing on purpose, and what's habit you should question. Full Medium write-up linked below.